普段、stellarmateを使っていますが先日 T-StudioさんがアップされましたAstrpiを使って見ようと思ってこのゴールデンウィーク外出自粛期間設定していました。
順調に接続できるようになったので備忘録を兼ねてご紹介いたします。
まず、私の機材の中でメイン機材です。

赤道儀とラズパイの接続はBluetoothで接続しています。

まず 機材の電源を入れて、androidタブレットのwifiをastrpiに接続します。

次に、タブレットで RealVNCにてラズパイと接続します。画面にはいろいろ接続先を登録していますが、タブレットで接続する時は名称は astrpi wifiにしています。

右上のBluetoothマークをクリックし、デバイスを選択。
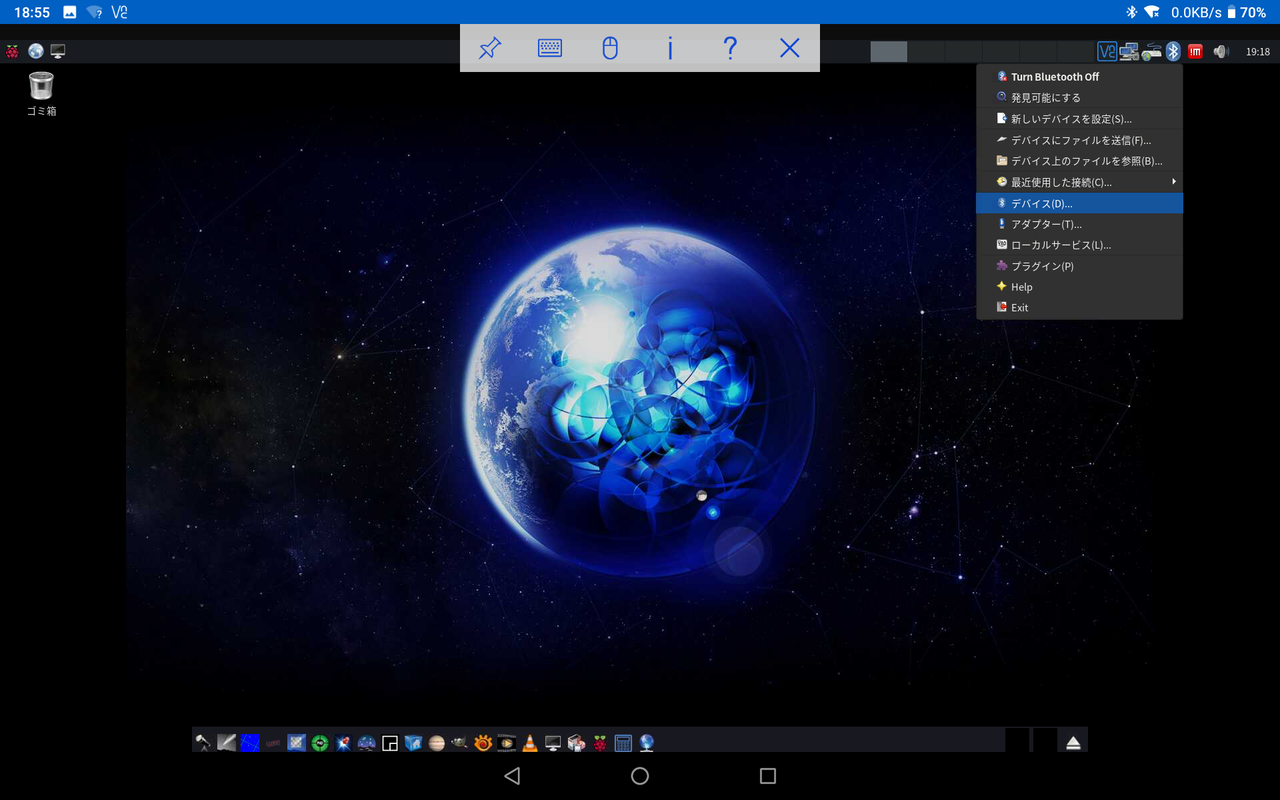
BTDirがデバイスなのでセットアップをクリック。

シリアルポートの割り当て完了。

PHD2をクリックしてここで起動しておきます。

kstarsもここで起動します。

タブレットのGoogle crome で 10.0.0.1/a.htmlと入力し操作画面を表示します。(タブレットにショートカットを登録しています。)
上部に日付、時刻が表示されていればOKです。
一番上の INDI WEB MANAGERをクリックします。

ここでは startをクリックしサーバーを起動。

二段目の IGPSをクリック

左上のGPS-ONをクリック、この状態のまま VNCのkstars画面に戻ります。

Ekos画面を表示し 再生ボタンをクリック。開始します。

INDIコントロールパネルの確認をします。
まず、GPSDパネルでGPS情報が取得できているか

次に Canon EOS60Dの Image Settingsのチェック
ここは何度セーブしても起動する度に元に戻っています。なので必ずチェックです。

Solver画面の下になんかエラーメッセージが出ていますねぇ。意味不明
警告。 計算された視野が範囲外です。望遠鏡の焦点距離とカメラのピクセルサイズが正しいことを確認してください。
翻訳すると上記の事ですが、255mmの焦点距離で 5184×3456のセンサーサイズだと
表示されているFOV 301.6×200.9でほぼ合っているんですが・・・・

kstarsの画面でチェックするのは、右上の時刻とkstarsの時刻が合っているか。
また、左下のGPS Locationは合っているかと言う所です。
一応 ガイド画面も見てみます。PHD2が接続できているかと言う所くらいかなぁ?
画面下の表示が出ていればOKです。

一応これで使えます。
終了時は下記の画面からラズパイをシャットダウンして終了です。

以上がastrpiの接続手順です。
もし間違っていたり気付いた所があればご指摘ください。

コメント
コメント一覧 (1)
アライメントモジュールに関しては初回はオプション項目もチェックしておくと安全ですよ。
ネタはたくさん詰め込んでおきましたのでお楽しみください。
nonka
が しました
しました